Nonholonomic Robot Pushing
 Contact: Yujie Tang (y.tang-6@tudelft.nl)
Contact: Yujie Tang (y.tang-6@tudelft.nl)
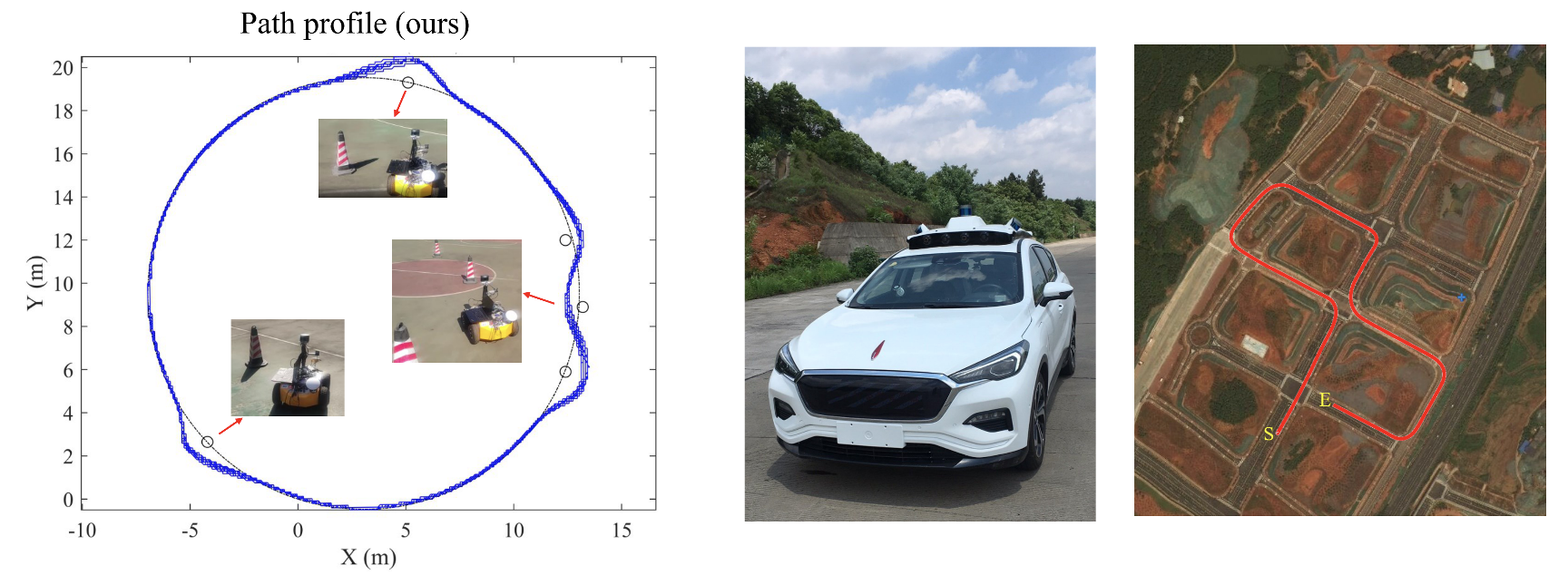
Model-Based Safe Reinforcement Learning with Time-Varying State and Control Constraints: An Application to Intelligent Vehicles
 Contact: Xinglong Zhang (zhangxinglong18@nudt.edu.cn)
Contact: Xinglong Zhang (zhangxinglong18@nudt.edu.cn)
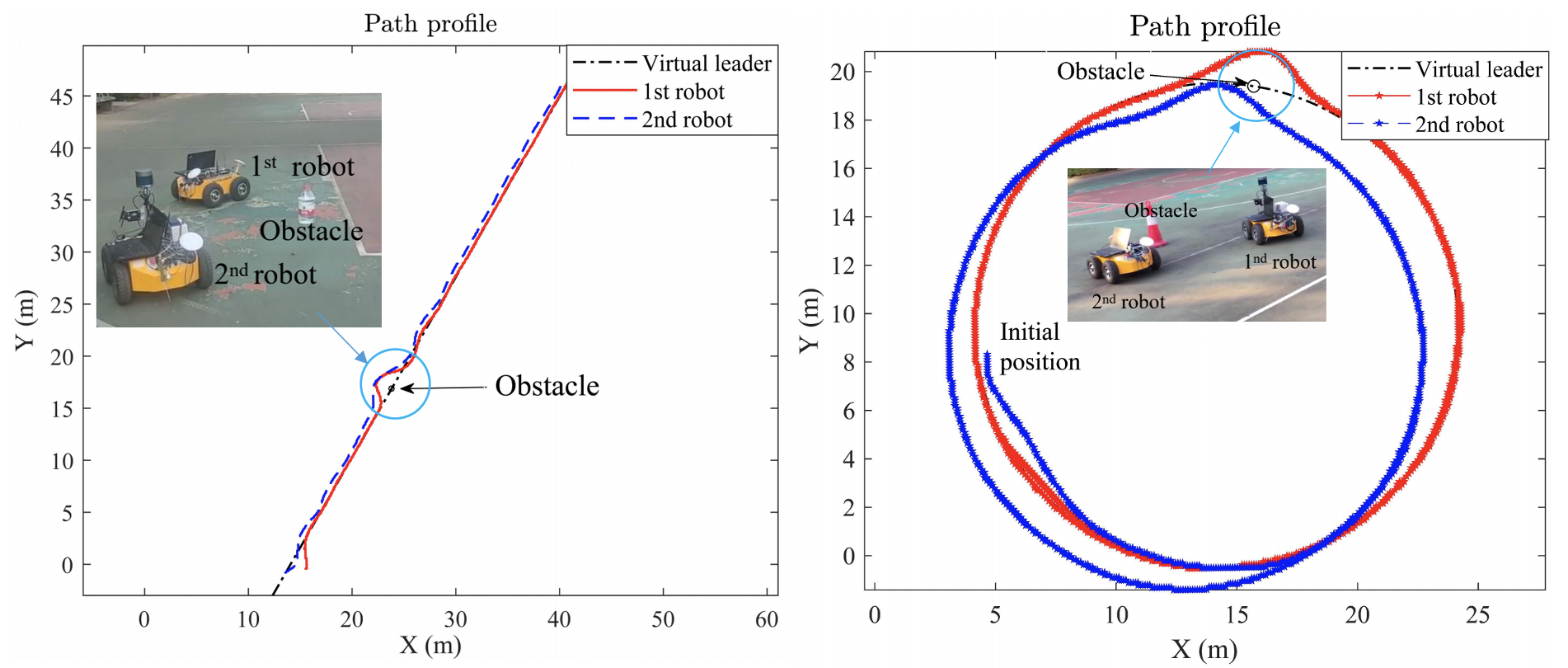
Safe Reinforcement Learning-based Distributed Predictive Control for Multi-Robot Systems
 Contact: Xinglong Zhang (zhangxinglong18@nudt.edu.cn)
Contact: Xinglong Zhang (zhangxinglong18@nudt.edu.cn)